| ||||||||||||||||||
|
|
||||||||||||||||||
|
|
||||||||||||||||||
| Mechanisms and Mechanics of Multiple Normal Fault Sets | ||||||||||||||||||
|
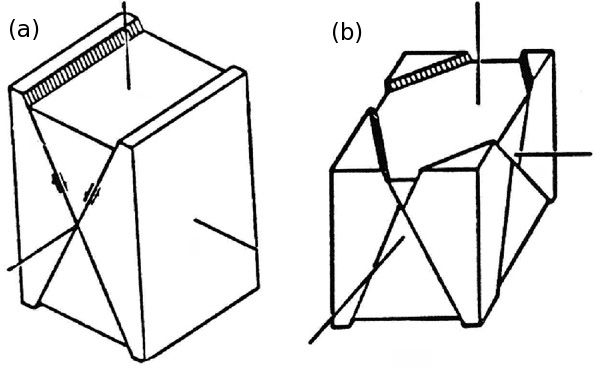
We have briefly referred to Anderson's conceptual and theoretical models of the three major fault types and their so-called conjugate patterns in two different sections: 'Multiple Fault Sets' and 'Andersonian and Mohr-Coulomb Theory of Faulting.' The issues regarding the number of fault sets and their intersection angles have been extensively discussed in the literature. It is straightforward to show that the conjugate faults can only accommodate two dimensional strain (or plane strain) neglecting the strain within the blocks between the faults. That is, one of the principal strain components coincides with the direction containing the intersection line of the two sets and represents a no-strain axis. For example, for the normal faults, the plane strain configuration is illustrated in Figure 1(a).
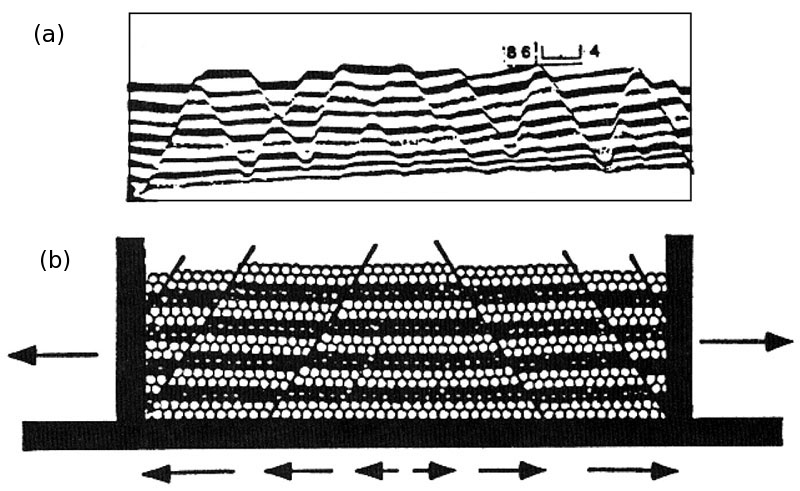
Many of the laboratory and numerical experiments under the plane strain condition, in fact, produce well-defined conjugate fault sets (Figure 2). These are documented under the headings just mentioned. However, deviations from the conjugate pattern containing two sets of faults occur quite frequently. These cases may be due to the switch of the relative magnitudes of the horizontal principal stresses. However, one of the most important reasons for the deviation from the classical conjugation pattern is that strain in nature may occur in 3D requiring more than two fault sets to accommodate it (Figure 1b).
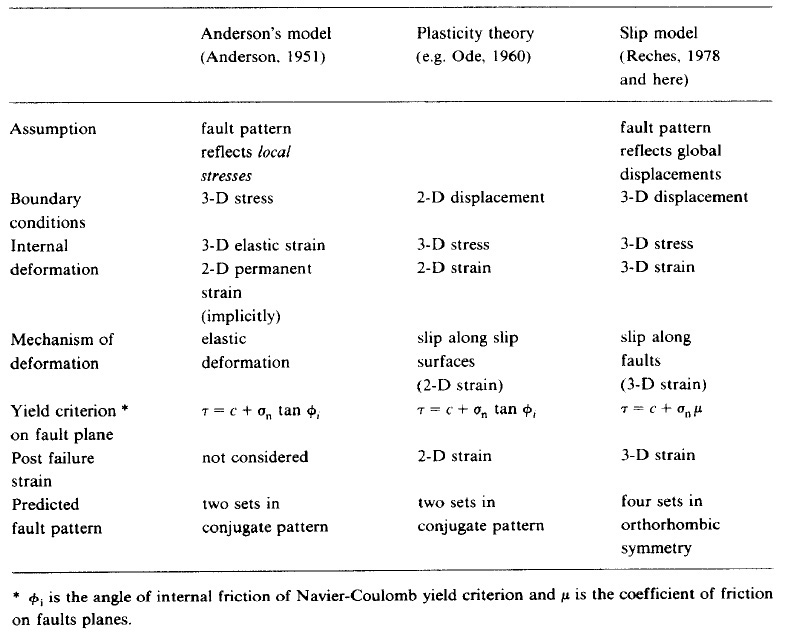
The table in Figure 3 includes a comparison between models of two conjugate sets of normal faults and four sets of normal faults with orthorhombic symmetry (Aydin and Reches, 1982; Reches, 1983). The specific orientations of the fault sets depend on the angle of internal friction, the friction coefficient, and the principal stress ratios.
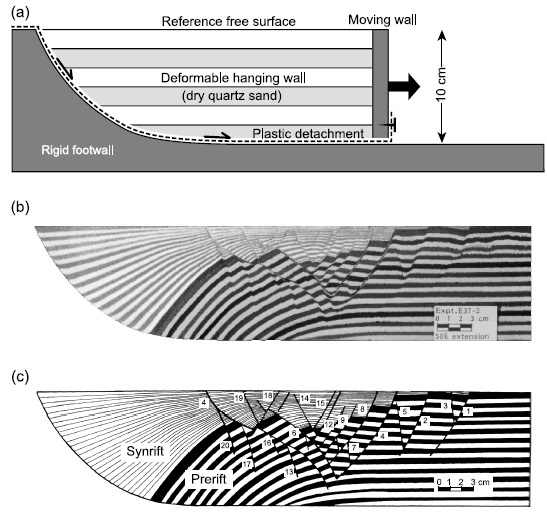
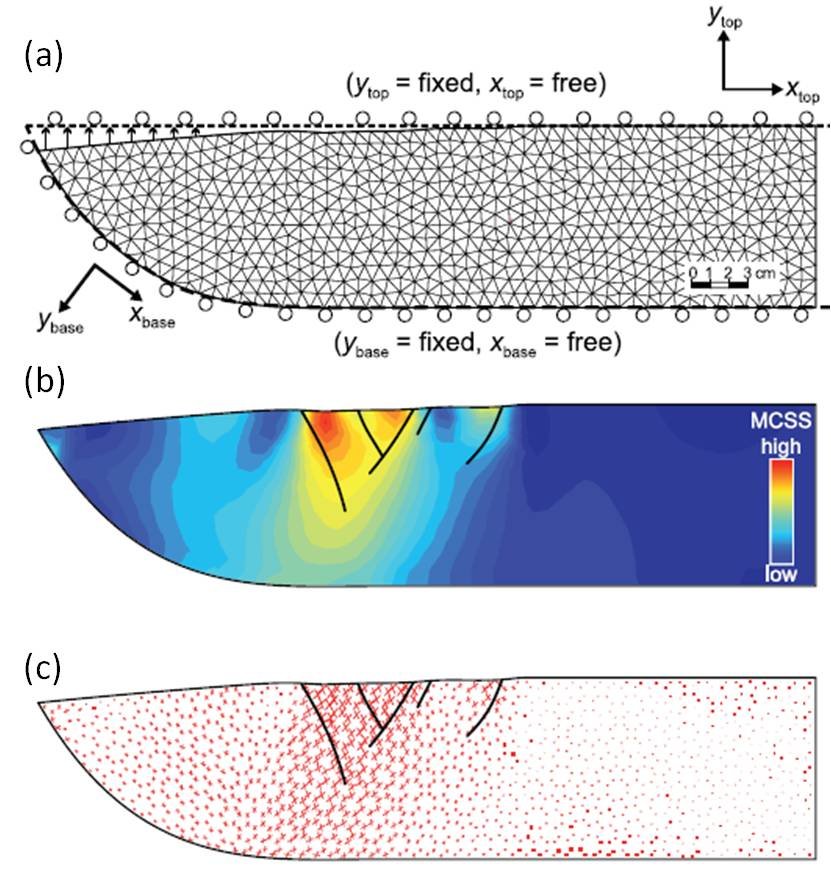
Another reason for the diversity of the normal fault patterns that should be mentioned here is that normal faults sometimes have listric geometry (Figures 4(a) and (b)) causing tilting, rotation, and the related heterogeneous stress and strain distribution. This would produce fault patterns different than those formed in homogeneous stress and strain fields. Figure 5(a) shows FEM mesh and boundary conditions used by Maerten and Maerten (2006) to calculate the distribution and orientation of the maximum Coulomb shear stresses shown in Figures 5(b) and (c), respectively, to justify the location and orientation of the faults in the laboratory experiments (Figure 4) by McClay (1983).
| ||||||||||||||||||
| Types of Mechanisms and Mechanics of Multiple Normal Fault Sets: | ||||||||||||||||||
| North Sea Fault In-fill Modeling | ||||||||||||||||||
| Reference: |
||||||||||||||||||
| Anderson, E.M., 1951 Aydin, A., Reches, Z., 1982 Maerten, L., Maerten, F., 2006 McClay, K.R., 1990 Ode, M., 1960 Reches, Z., 1983 Younes, A.I., Aydin, A., 1998 |
||||||||||||||||||
|
Readme | About Us | Acknowledgement | How to Cite | Terms of Use | Ⓒ Rock Fracture Knowledgebase |
||||||||||||||||||